









 關(guān)注途遠(yuǎn)GIS官方微信
關(guān)注途遠(yuǎn)GIS官方微信



實景三維是一種運(yùn)用數(shù)碼相機(jī)對現(xiàn)有場景進(jìn)行多角度環(huán)視拍攝然后進(jìn)行后期縫合并加載播放程序來完成的一種三維虛擬展示技術(shù)。實景三維技術(shù)廣泛應(yīng)用于諸多領(lǐng)域網(wǎng)絡(luò)虛擬展示。實景三維建模和測圖相關(guān)標(biāo)準(zhǔn)的研制發(fā)布,將會對三維建模和測圖工作的技術(shù)設(shè)計、作業(yè)實施、數(shù)據(jù)處理和質(zhì)量控制提供指導(dǎo),對提高其精細(xì)化和標(biāo)準(zhǔn)化技術(shù)水平、推動產(chǎn)業(yè)技術(shù)和數(shù)據(jù)的互通共享起到非常重要的作用。2022年1月20日,由中國和平利用軍工技術(shù)協(xié)會主
2022年01月22日
利用一個未知坐標(biāo)點(diǎn)進(jìn)行定向(設(shè)置),建站完成后,在此測站采集的點(diǎn)數(shù)據(jù)需進(jìn)行歸算,進(jìn)行歸算需要獲取后視點(diǎn)的坐標(biāo)。任意建站界面的說明◆測站:輸入已知測站點(diǎn)的名稱,通過[+]可以調(diào)用或新建一個已知點(diǎn)做為測站點(diǎn) ;◆儀高:輸入當(dāng)前的儀器高;◆鏡高:輸入當(dāng)前的棱鏡高;◆后視點(diǎn):輸入已知后視點(diǎn)的名稱,通過[+]可以調(diào)用或新建一個已知點(diǎn)做為后視點(diǎn);◆方位角:通過直接輸入方位角來設(shè)置后視;◆當(dāng)前 HA:顯示當(dāng)前的
2022年01月08日
天氣情況復(fù)雜多變,獲取的航空影像難免會出現(xiàn)不同程度霧霾現(xiàn)象。在西南的成都,重慶,云南,貴州,南方的廣東,海南等地區(qū)大霧彌漫的天氣居多,想找一片凈空拍照很不容易。在航空數(shù)據(jù)處理工作中,我們碰到了大量各種各樣的照片,有霧的照片會導(dǎo)致后期正射影像成果質(zhì)量降低,甚至在做空三平差時無法進(jìn)行。我們一直在思索,有沒有辦法可以去除無人機(jī)影像上的霧霾現(xiàn)象。針對航空影像特點(diǎn),開發(fā)了航空影像去霧軟件,經(jīng)過大量測試及改進(jìn)
2022年01月08日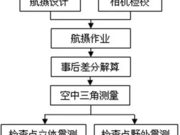
1∶500 地形圖測繪全野外成圖工作量大,工期較長,成本較高。長期以來,為了減少工作量、縮短工期、降低成本,業(yè)內(nèi)一直嘗試采用航測法成圖,并做了大量研究和嘗試,但精度一直不理想。近些年無人機(jī)航攝因為使用方便,數(shù)據(jù)獲取成本低、速度快,在1∶1000、1∶2000 等比例尺的地形圖測繪、正射影像圖生產(chǎn)等領(lǐng)域得到廣泛應(yīng)用,但在1∶500 航測法地形圖測繪中,精度仍然不能完全達(dá)到規(guī)范要求。本文通過對1∶50
2022年01月07日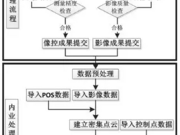
傳統(tǒng)的三維建模和低空攝影測量技術(shù)已經(jīng)遠(yuǎn)遠(yuǎn)不能滿足當(dāng)下快速精細(xì)建模的要求。傳統(tǒng)三維建模主要依靠二維的平面矢量圖、正射影像圖等數(shù)據(jù)為底圖建立白膜,通過將高程數(shù)據(jù)和拍攝的紋理數(shù)據(jù)貼在白膜上來構(gòu)建。由于傳統(tǒng)的建模方法效率低,勞動強(qiáng)度大、生產(chǎn)成本高等缺點(diǎn),將逐漸被淘汰。傳統(tǒng)低空攝影測量技術(shù),廣泛應(yīng)用在大面積區(qū)域調(diào)查、安全監(jiān)測、災(zāi)害應(yīng)急、環(huán)境保護(hù)等諸多領(lǐng)域。通過無人機(jī)搭載傳感器,快速、高效、便捷地獲取高分辨率
2022年01月07日
通過航空攝影獲取的像片能最詳盡地記錄地 表的地物、地貌以及相 互之間的關(guān)系,是測制和更 新l家基本比例尺地形圖的基礎(chǔ)信息源。航攝質(zhì) 量的優(yōu)劣直接影響到航測工作中的影像匹配、像點(diǎn) 坐標(biāo)最算,影響數(shù)字線劃圖、數(shù)字高程模型等測繪 成果的數(shù)學(xué)精度,影響數(shù)字正射影像圖、三維仿真 等后期成果的影像質(zhì)量和效果。因此,對航攝過程 中的各個環(huán)節(jié)的質(zhì)量控制,是提高航攝質(zhì)量的重要f段之·。筆者試通過航測生產(chǎn)及航攝成果驗
2022年01月07日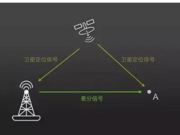
測繪無人機(jī)采用RTK差分定位系統(tǒng)(可實現(xiàn)厘米級定位),這樣也是為了加快作業(yè)效率。據(jù)介紹如果采用普通GPS定位,為了校正誤差還需要派人去實地布設(shè)若干個像控點(diǎn),而用了RTK則可以基本不用、或是只需要少量像控點(diǎn)。這篇文章告訴你測繪無人機(jī)上RTK到底有什么用?第一:我們得明白什么是RTK?RTK(Real -time kinemaTIc)定位技術(shù)就是基于載波相位觀測值的實時動態(tài)定位技術(shù)
2022年01月06日
以前,搞無人機(jī)的十個人有八個是航空、氣動、機(jī)械出身,更多考慮的是如何讓飛機(jī)穩(wěn)定飛起來、飛得更快、飛得更高。如今,隨著芯片、人工智能、大數(shù)據(jù)技術(shù)的發(fā)展,無人機(jī)開始了智能化、終端化、集群化的趨勢,大批自動化、機(jī)械電子、信息工程、微電子的專業(yè)人材投入到了無人機(jī)研發(fā)大潮中,幾年的時間讓無人機(jī)從遠(yuǎn)離人們視野的軍事應(yīng)用飛入了尋常百姓家、讓門外漢可以短暫的學(xué)習(xí)也能穩(wěn)定可靠的飛行娛樂。不可否認(rèn),飛控技術(shù)的發(fā)展是這
2021年12月31日
在CASS制圖時常需要對地物進(jìn)行標(biāo)注,有些標(biāo)注需要按照一定格式進(jìn)行,我們進(jìn)行標(biāo)注時常常需要對標(biāo)注進(jìn)行更改。比如在數(shù)字前面加字母: 如果我們原有的標(biāo)注首位有固定的數(shù)字,如圖所示,所有標(biāo)注前都有0。那么我們可以直接輸入find命令,彈出對話框之后將0全部改為xxx0。這樣所有標(biāo)注前就都加上了xxx: 如果標(biāo)注只是數(shù)字沒有可替換的字符,那么我們需要在ArcMap中進(jìn)行操作。
2021年12月26日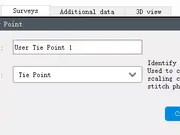
今天匯總下關(guān)于ContextCapture處理中常見的一些問題以及ContextCapture對于電腦配置方面的問題,答案供大家參考。數(shù)據(jù)處理1) ContextCapture整套教程可以參考這篇,很全面:跑模電腦配置、CC集群和空三技巧、三維測圖…一整套航測內(nèi)業(yè)實戰(zhàn)教程2)ContextCapture可以混合不同來源,不同分辨率的照片建模嗎?例如,地面照片和航拍影像結(jié)合?
2021年12月26日
聯(lián)系電話:17628299734(微信同號)
工作時間:周一到周六 9:00-18:00
公司地址:天府新區(qū)益州大道南段588號益州國際廣場寫字樓20層
版權(quán)所有 ? 2016-2024 成都途遠(yuǎn)全景科技有限公司 保留一切權(quán)利 蜀ICP備18033506號-4  川公網(wǎng)安備 51015602000116號
川公網(wǎng)安備 51015602000116號