

空間濾波通過圖像與卷積模板的卷積運算來實現圖像濾波。根據卷積模板的不同,可以分為平滑和銳化濾波。
1
平滑濾波
平滑濾波一般用于消除圖像中的隨機噪聲,常見的平滑濾波方法有均值濾波和中值濾波等。在ENVI中打開一個文件,ENVI Classic主菜單→Filter→Convolutions and Morphology,打開Convolutions and Morphology Tool窗口,如下圖所示,在該對話框進行平滑或銳化濾波設置。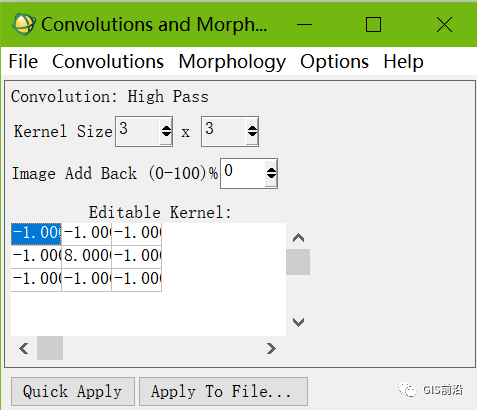
Convolutions and Morphology Tool 窗口→Convolutions→Low Pass,進行低通濾波(均值濾波),如下圖所示: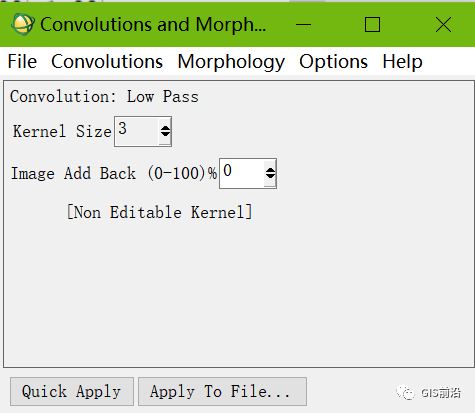
圖片
其中Kernel Size用于設置濾波器尺寸只能為奇數,默認值為3,為什么只能是奇數?首先我們要知道濾波器就是鄰域分析窗口,卷積運算結果是要放到窗口中間的那個像元上,所以奇數的窗口才符合要求;Image Add Back(0-100)%文本框用于設置背景圖像疊加百分比,即原圖像在增強后圖像中的影響比例。設置這兩個參數后,點擊Quick Apply按鈕可選擇某個波段快速進行濾波,或者點擊Apply To File…按鈕選擇整個文件進行濾波。
但是均值濾波在對圖像進行平滑的同時也破壞了圖像的細節部分,從而使圖像變得模糊。濾波器尺寸越大,圖像越模糊。下面小編給出了某原始圖像和不同濾波器尺寸均值濾波結果的對比圖。
原始圖像
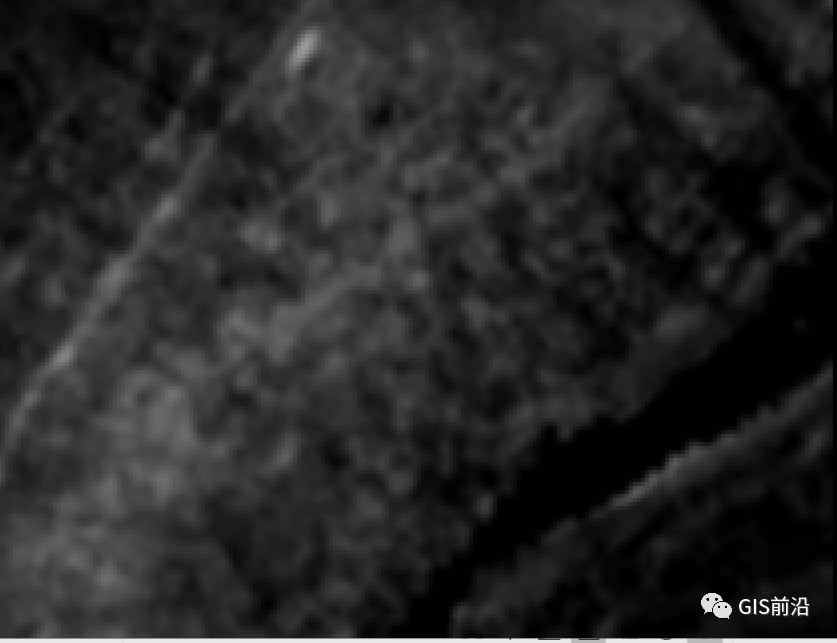
33均值濾波圖像
99均值濾波圖像
Convolutions and Morphology Tool窗口→Convolutions→Median,進行中值濾波。相比于均值濾波,中值濾波能夠在一定程度上保留圖像的細節信息。該方法對椒鹽噪聲表現比較好,對高斯噪聲表現較差;而均值濾波對高斯噪聲表現較好,對椒鹽噪聲表現較差。這時候就會有小伙伴說了,什么叫椒鹽噪聲和高斯噪聲呢?小編大概講講兩者的區別吧,高斯噪聲中噪聲的概率密度函數服從高斯分布(即正態分布),即某個強度的噪聲點個數最多,離這個強度越遠噪聲點個數越少。
高斯噪聲是一種加性噪聲,即噪聲直接加到原圖像上,因此可以用線性濾波器濾除。椒鹽噪聲是由圖像傳感器、傳輸信道、解碼處理等產生的黑白相間的亮暗點噪聲,往往由圖像切割引起。椒鹽噪聲包括鹽噪聲(高灰度噪聲)、胡椒噪聲(低灰度噪聲)。兩者同時出現時,在圖像上呈現為黑白雜點。下面小編給出了某原始圖像和不同濾波器尺寸均值濾波結果的對比圖。
原始圖像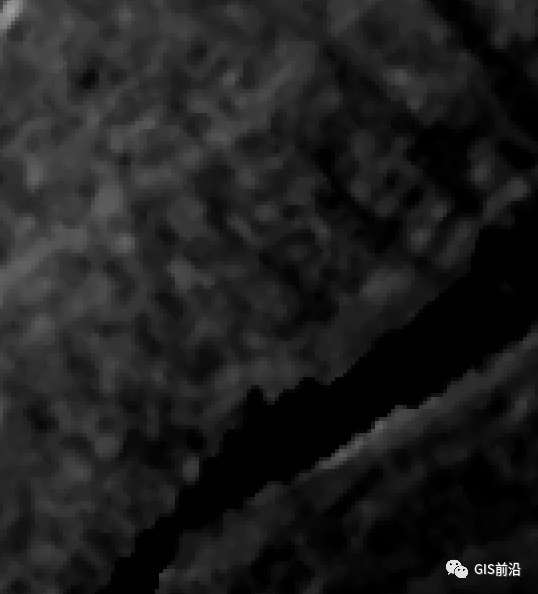
33中值濾波圖像
99中值濾波圖像
2
銳化濾波
銳化濾波一般用于突出邊緣和輪廓、線狀目標信息,也稱為邊緣增強。常見的銳化濾波模板有High Pass(高通濾波)算子、Roberts(羅伯特)算子、Sobel(索貝爾)算子和 Laplacian(拉普拉斯)算子等。
在ENVI Classic里面的Convolutions and Morphology Tool窗口→Convolutions→High Pass進行高通濾波。為了實現對高頻信息的增強,卷積模板中心值為正值,四周為負值,默認鄰域范圍是9*9像元。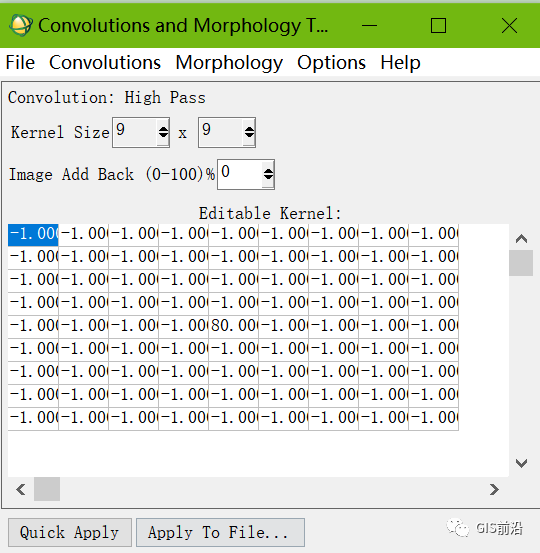
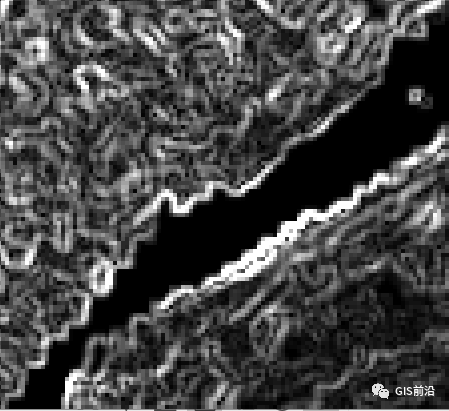
原始圖像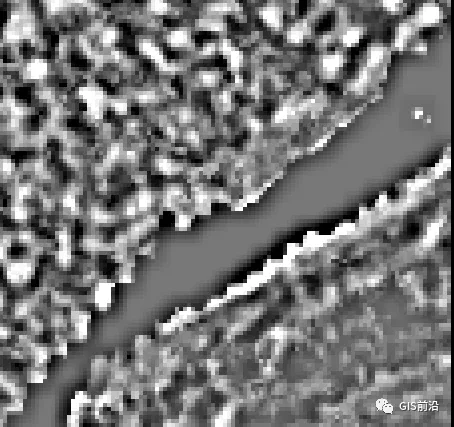
高通濾波銳化結果
除了高通濾波算子之外,ENVI還提供了基于Roberts算子、Sobel算子和 Laplaciar算子的空間濾波方法。其中Sobel算子和Roberts算子的模板是固定的,不能設置卷積模板尺寸,只能設置疊加背景圖像的百分比。
Convolutions and Morphology Tool 窗口→Convolutions→Roberts,基于Roberts 算子進行濾波運算。同樣在Convolution 菜單下選擇Sobel和Laplacian,可分別進行基于Sobel算子和Laplacian算子的濾波。
Sobel算子銳化結果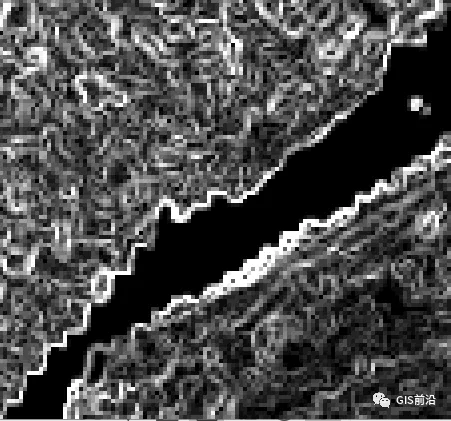
Roberts算子銳化結果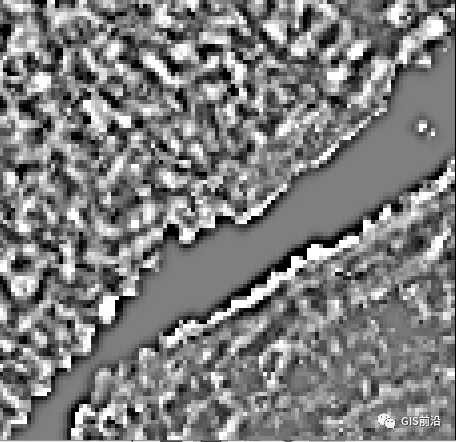
Laplacian算子銳化結果
Roberts和Sobel算子都屬于一階微分算子,檢測灰度值的梯度變化,能夠有效突出邊緣。Roberts算子定位比較準確,但對噪聲非常敏感。Sobel算子卷積模板具有平滑效果,能在一定程度上抑制噪聲。Laplacian算子屬于二階微分算子,主要用于檢測灰度突變的區域。
來源:https://blog.csdn.net/qq_43173805/article/details/119843646
本文鏈接:http://www.aiquka.com/blog/343.html
本文標簽:
上一篇:利用ENVI進行輻射定標和投影轉換
下一篇:三維模型直接生成DOM的軟件











