

1.柵格創建TIN
柵格轉TIN使用的是DEM數據(數字高程模型),TIN 是基于矢量的數字地理數據的一種形式,通過將一系列折點(點)組成三角形來構建。各折點通過由一系列邊進行連接,最終形成一個三角網。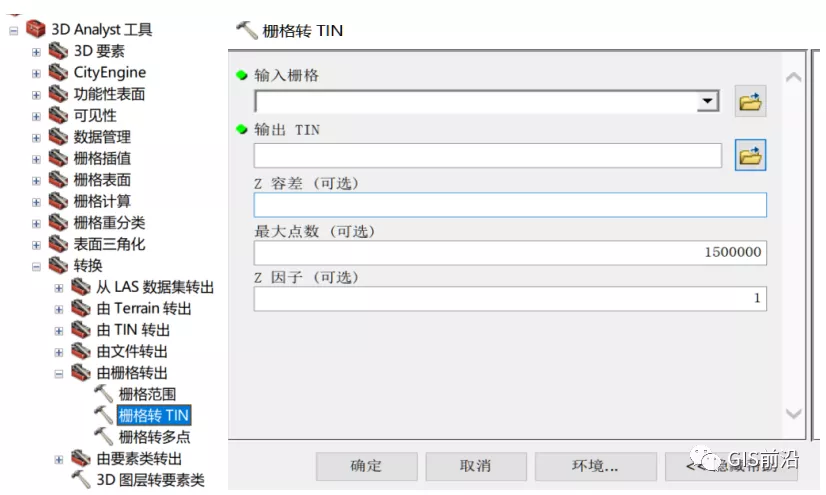
- Z容差是和輸入柵格的像元大小的容差,容差越小創建的像元越小,表面越平滑,但是數據量越大,加載越慢。
2.Z因子是輸入的柵格的高度轉換成輸出TIN的高度相乘的系數,用來將Z單位轉換成x,y單位。
3.注意:生成的TIN邊界比柵格邊界小半個柵格單元。
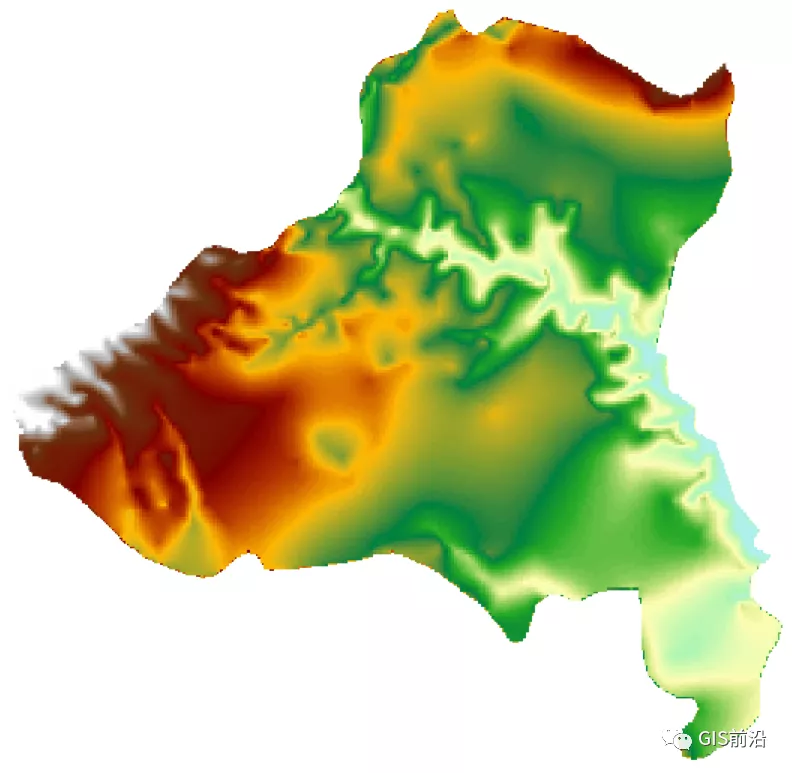
分析結果如下: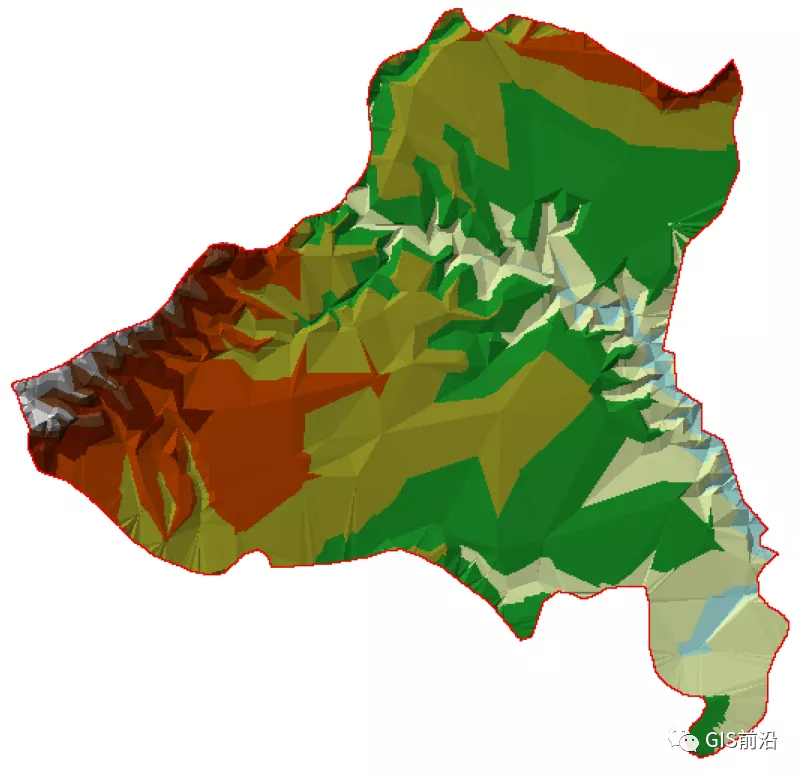
圖片 Z容差此時比較大,三角網也很大
經過結合柵格生成的高程點進行TIN編輯后生成的更為精準的TIN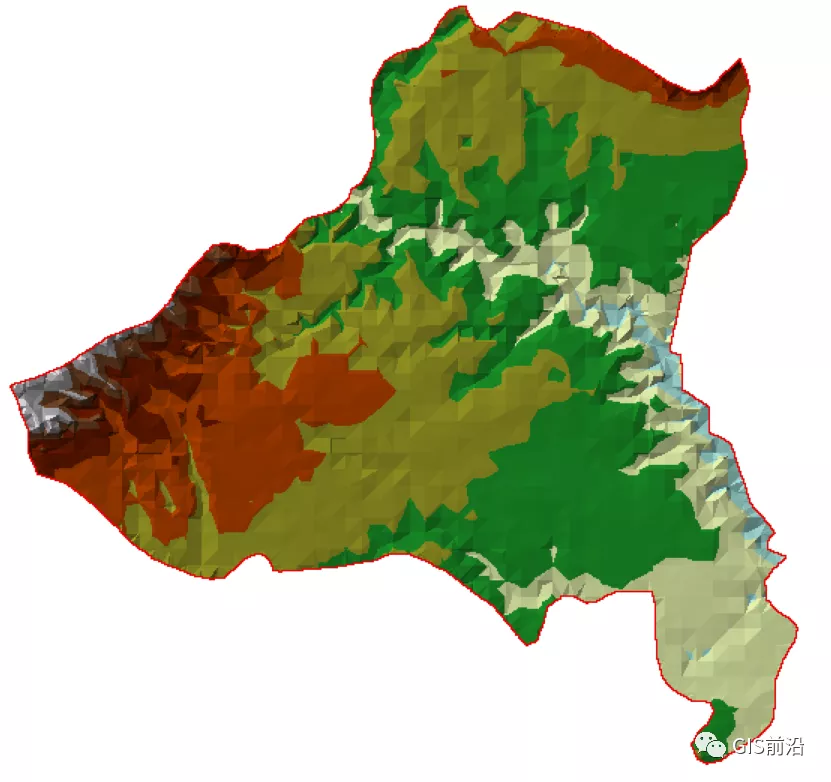
2.由TIN創建柵格
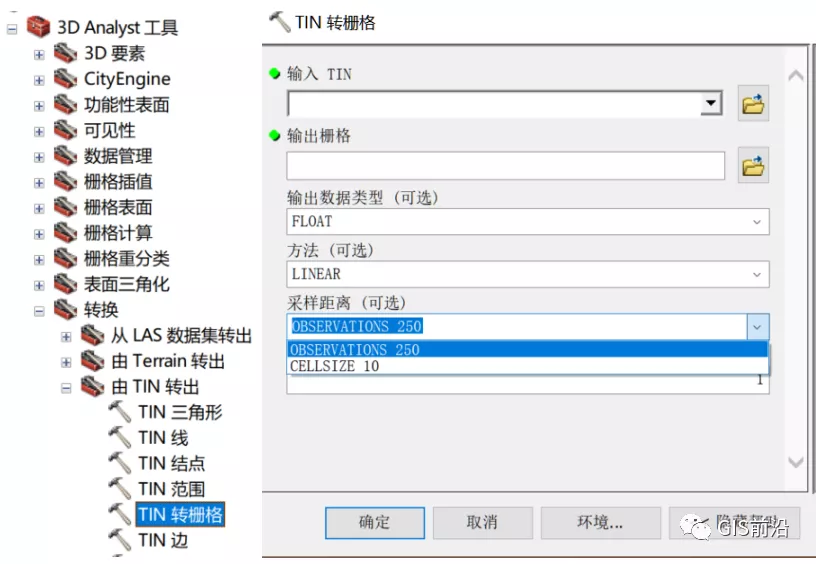
1.Z因子是輸入的TIN高度轉換成輸出的柵格的高度相乘的系數,用來將Z單位轉換成x,y單位。
2.生成的柵格邊界由采樣距離決定,第一種采樣距離方法生成的像元大,生成的柵格范圍會超過之前的TIN邊界以及之前的柵格邊界,第二種采樣距離方法生成的像元小,生成的柵格范圍和TIN一致。
3.用自然鄰域插值法計算像元值,很平滑,和之前的TIN輪廓差別大。
4.用線性插值法計算像元值,很僵硬,和之前的TIN輪廓非常像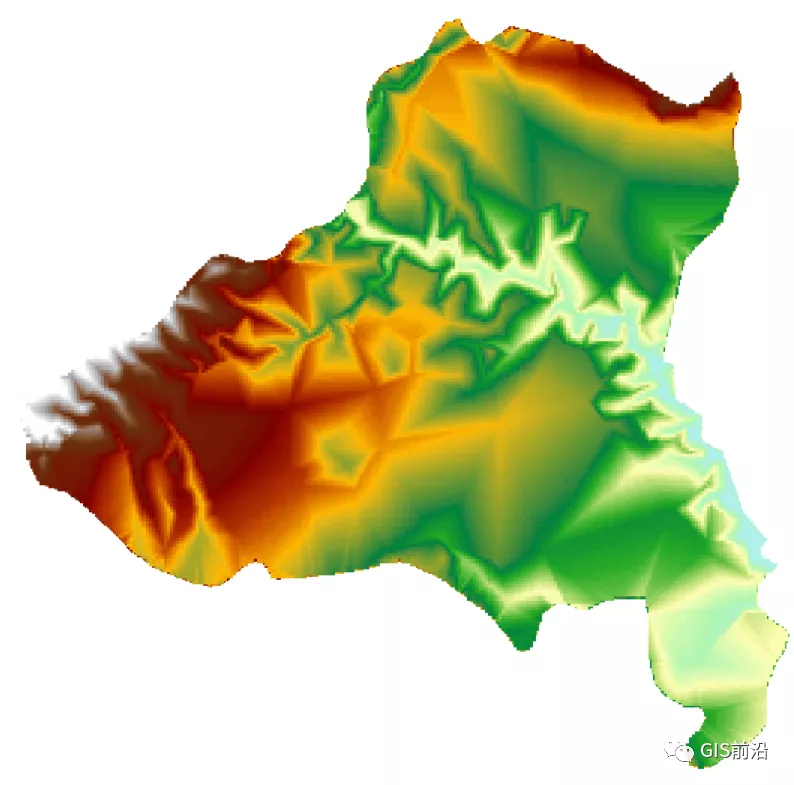
地形數據集(Terrain):一種多分辨率的基于TIN的表面數據結構,通過激光雷達,聲納和攝影測量源進行構建,小編目前還沒有用過,嗚嗚嗚嗚嗚。
視域分析:從那些點可以看到那些區域,和視點分析差不多(這個是點看面,視點分析是面看點,恰恰相反)。
輸入柵格要求是DEM數據(數字高程模型),輸入觀察點要求是高程點數據。
分析結果: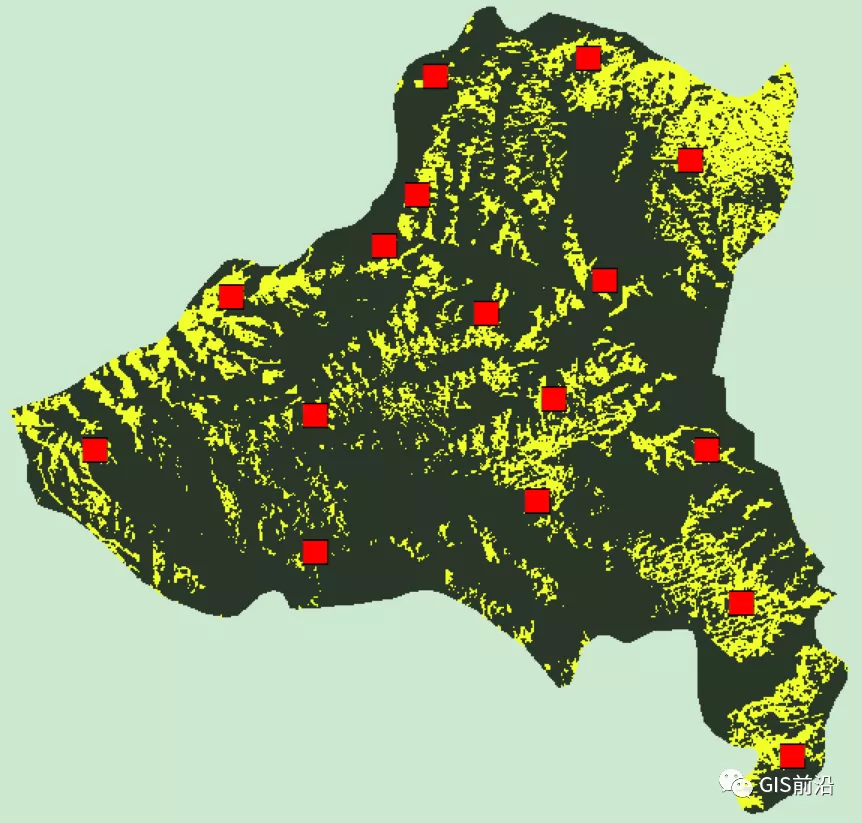
黃色的是山脈,棕色地區的是觀察點所能看到的區域
視點分析:
從哪些地方可以看見哪些點,看的點越多說明該區域視野越好。(觀察點最多只能設置16個哦)
輸入柵格要求還是DEM數據(數字高程模型),輸入觀察點要求是高程點數據。
分析結果如下: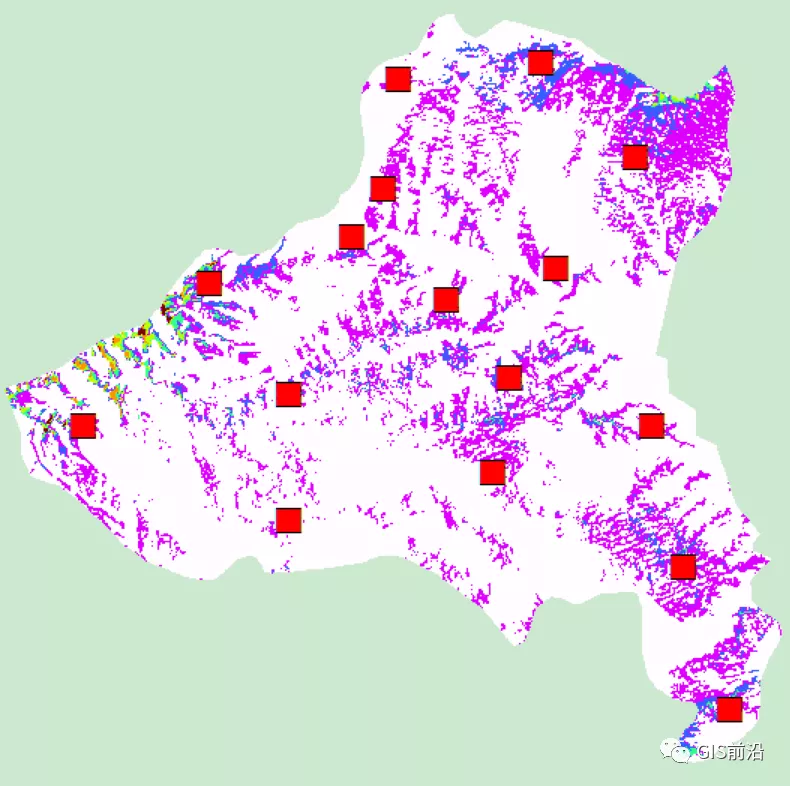
每種顏色代表一個地區的視野范圍,不同顏色的地區看到的觀察點數量不一樣,既通視能力不一樣。
成都途遠GIS是一家專業致力于無人機航空攝影測繪、航空數據處理、GIS地理信息系統研發、數字孿生城市制作、數字沙盤模型等業務的創新型科技公司,為您提供一站式地理信息服務。











