

三維模型是物體的多邊形表示,通常用計算機或者其它視頻設備進行顯示。顯示的物體可以是現實世界的實體,也可以是虛構的物體。

三維模型已經應用于各種不同的領域。醫療行業使用它們制作器官的精確模型;電影行業將它們用于展現活動的人物、物體以及現實電影;建筑業將它們用來展示提議的建筑物或者風景表現;在最近幾十年,地球科學領域開始構建三維地質模型。
傾斜攝影測量技術作為一個新興的技術方法,在三維建模和工程測量中有廣泛的應用前景。
Wish3D·Earth是圖新地球技術團隊基于 WebGL技術自主研發的國產實景三維模型Web端發布展示平臺,支持發布大規模(TB級)各類二三維數據,包括衛星影像、地形、傾斜模型、人工模型、BIM模型等,完美實現了實景三維模型和人工模型同場景展示效果,數據發布后支持一鍵分享到網頁端、手機端進行成果匯報展示,在線體驗www.tuxingis.com
1 什么是傾斜攝影?
近年來,構建智慧城市正在如火如荼地展開,城市三維數字模型在其中扮演著十分關鍵的角色。要繪制高效、智能的城市圖景,就需要對城市空間三維數據進行表達與處理,也就需要建立城市的三維景觀模型。在這個過程中,除了備受關注的人工建模,還有一項新的建模技術正在興起并發揮著越來越重要的作用。
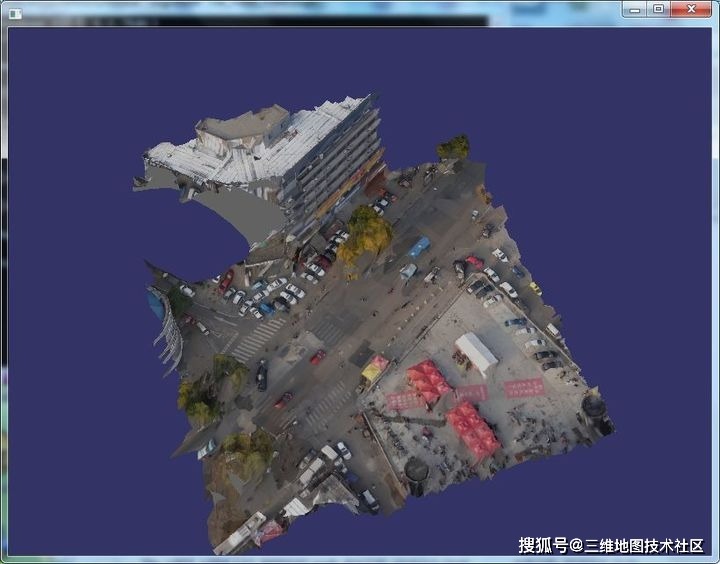
圖1 傾斜攝影瓦片數據
初見圖1所示模型,你一定想知道這個三維模型是怎么構建的。棱角參差,沒有完整的建筑,看著不太符合人工建模(如3Ds MAX建模軟件)的結果。其實圖中所示的三維模型就是傾斜攝影相機飛過城市上空再經過軟件的預處理所獲取的一個瓦片數據(像圖2中一塊一塊拼起來的,形象稱為瓦片數據)。
當我們將這樣大量的瓦片數據拼接起來后,就形成了一個城市三維景觀模型。這個神奇的新興建模技術就是我們所要介紹的傾斜攝影技術:傾斜攝影數據獲取設備+后處理軟件全自動化生成城市三維景觀模型。

圖2 瓦片數據組成整體模型示例
傾斜攝影以一個航空飛行器攜帶一組傾斜攝影設備(一個垂直正射鏡頭和若干個傾斜鏡頭)飛行過城市上空便可實現自動化迅速建模,真實還原城市三維場景。這個近十幾年來才發展起來的“后起之秀”,顛覆了傳統城市建模。它的發展主要集中在兩點:數據獲取設備(即傾斜相機)和后處理軟件。
目前國內已經有很多傾斜攝影系統,如北京紅鵬天繪公司的微型無人機傾斜攝影系統,廣州中海達公司的iScan系列等。也有越來越多的人開始投入到傾斜攝影技術的研究上來。傾斜攝影技術最大的特點是快,這正契合現在很多城市現代化進程對建模的基本要求,例如武漢市的城市口號——“武漢,每天不一樣”。
傳統的基于人工或半人工的城市三維建模顯然滿足不了這種快城市化發展需求,因此傾斜攝影應運而生。傾斜攝影技術顯著提高了建模速度,自動化建模解放了人力。而在模型精度上,傾斜攝影技術也在不斷突破創新,某些應用層面上已經不亞于人工建模。
總的來說,傾斜攝影技術的特點可以歸納為:
(1)真實性。無人機觀測數據直接用于模型構建,包括地物的外觀、位置、高度屬性都與真實場景一致。
(2)高效性。借助無人機或其他各種飛行設備,整個城市的數據可在一天內采集,后續軟件預處理都是全自動化實現。
(3)較高的性價比。除了在人力、財力和時間方面有很強的優勢,它本身屬于航空攝影測量的一種,所得數據是帶有空間位置信息的可測量影像數據,能輸出多種成果,應用于其他多種領域。
2 傾斜攝影兩大關鍵技術
前面已經提到,傾斜攝影技術有兩大主要發展:數據獲取設備與后處理軟件。數據獲取設備也就是傾斜攝影相機,傳統的攝影測量只是像拍證件照一樣從正上方垂直拍攝正投影像,而傾斜攝影設備是由一個飛行平臺搭載多個傳感器,同時從正射和多個傾斜角度進行多角度全方位的影像采集。
具有代表性的設備有德國IGI公司的Penta-DigiCam系統、徠卡公司旗下的RCD30和ADS40三線陣數碼相機、微軟公司旗下UCO等,這些也是行業內最早的傾斜攝影數據獲取設備。目前最常見的是1+4傳感器設備,即一個垂直傳感器+四個傾斜傳感器。隨著技術的發展,出現了搭載更多傾斜鏡頭的傾斜攝影設備,圖3展示了1+8傳感器的傾斜攝影設備。
后處理軟件,是指對傾斜攝影設備拍攝的航空影像進行解算和預處理獲取城市三維數據模型(多個角度觀察地物,記錄了地物的三維空間位置信息)。具有代表性的有美國Pictometry公司的Pictometry系統、法國Acute3D公司的Smart3DCapture和微軟Vexcel公司的Ultramap軟件等。數據獲取設備和后處理軟件共同推動了傾斜攝影技術的發展。

圖3 多傾斜鏡頭的傾斜攝影相機
3 傾斜攝影建模原理
在學習傾斜攝影建模原理之前,我們需要先了解地形地貌模型的構建原理。
地形地貌建模是較早實現的自動化建模,基于數字高程模型(Digital Elevation Model, DEM)數據,在ArcGIS或3Ds MAX等軟件中即可實現三維模型的構建。在地貌模型的構建過程中,為了達到逼真效果,最常見的方法就是DEM與數字正射影像(可以理解為紋理圖像)疊加形成地表景觀。在這個過程中,高程三維建模主要包括兩種方式:基于不規則三角網(TIN, Triangulated Irregular Network)的三維表面建模和基于規則格網的三維表面建模。
其中,不規則三角網通過不規則分布的離散數據點生成連續的三角面來逼近地形表面(圖4)。用于生成不規則三角網的三角形中,狄洛尼(Delaunay)三角形在地形擬合方面運用的較普遍,因此常被用于不規則三角網的生成。它的構成原則是三角形的外接圓內部不包括其他點。當地形中包含有大量的特征線如斷裂線、構造線時,TIN模型能更精確合理表達地表形態。

圖4 不規則三角網構造的地形表面
規則格網,由原始的DEM數據(柵格影像,像元值存儲高程值)直接生成地形。規則格網在X和Y方向上具有不可變的分辨率。當地形起伏較大時,規則格網的表達效果則不如不規則三角網。
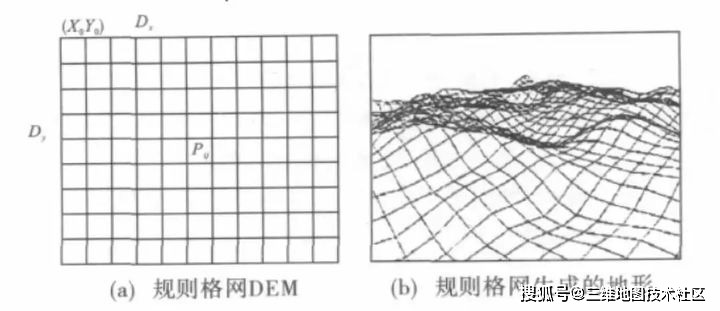
圖5 DEM與DEM生成的地形
傳統的城市建模中,多是以半自動化半人工的建模方式進行。首先以DEM數據為基礎,自動化構建地形地貌模型,疊加數字正射影像,形成粗糙的城市三維模型。之后,經過3Ds MAX、Sketch Up等建模軟件進行房屋、植被的精細建模。
這種建模方式下,并非要事無巨細,一概都逼真表達,而是根據不同的需要和有限的時間、經濟、技術等條件進行各種取舍與簡化。即便如此,獲取較高精度的城市三維模型仍需要花費大量的人力、財力與時間。并且隨著城市化建設進程的加快,這種僅依靠人力的建模方法,無法短周期內更新,存在著很多弊端。
相比之下,傾斜攝影技術進一步將這種“自動化”推向了后續的房屋、植被等的精細建模。也就是說,整個城市景觀都采用自動化的方式。從中,傾斜攝影技術可以獲得三種表現形式的數據:實體模型文件、TIN三角網數據和點云數據。
其中,點云數據是傾斜攝影獲取的最基礎的數據,點簇在空間中的分布代表了具有變化特征的位置,一般變化越劇烈的位置,點云越密集。點云數據的獲取,正是利用了多角度拍攝地物所蘊含的三維空間信息,是航空影像最直接的解算結果。那么,傾斜攝影究竟是什么樣的形式呢?如圖所示,在傾斜攝影航空拍攝中,五個鏡頭所拍攝影像需要有一部分重疊,一般采取30%旁向重疊度和66%航向重疊度。三維點的坐標通過多視影像聯合平差和多視影像密集匹配等方法解算得到。
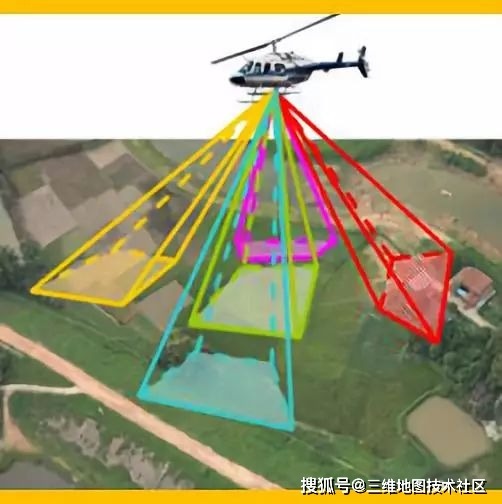
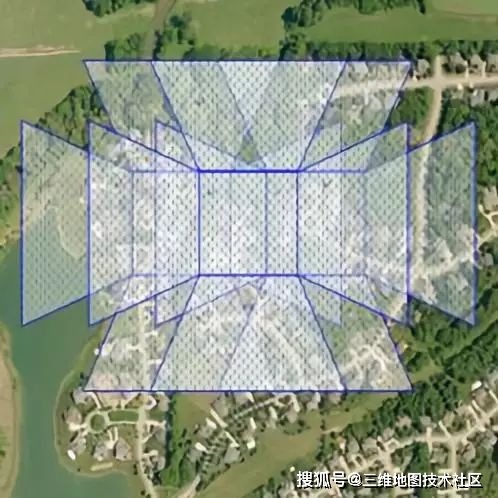
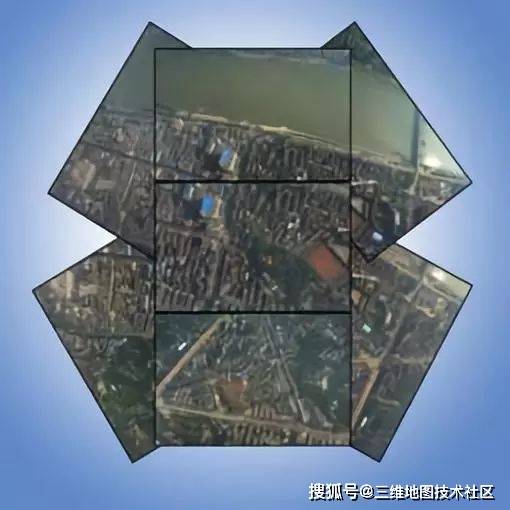
圖6 傾斜攝影航拍效果圖
獲取點云數據之后,類似于地形地貌建模,通過點云可以構建出TIN,在TIN的基礎上通過三角面片的組合可生成白模,然后通過紋理圖片投影映射,就可以得到我們看到的實體模型文件了。

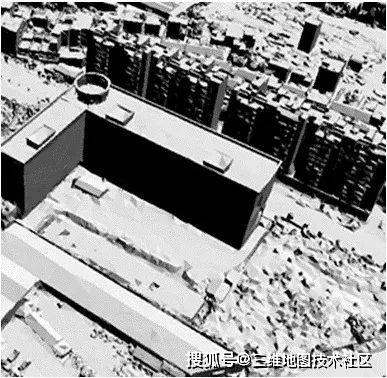

圖7 由點云到真實三維模型的構建過程
4 傾斜攝影數據應用的難題
那么,傾斜攝影技術如此快速的建模方法為什么沒有普及應用呢?雖然相對于人工建模,傾斜攝影技術無論在建模速度,還是在建模精度上都已經取得了很大優勢。但在模型后續的應用上,傾斜攝影模型還存在一個很大的弊端:它的建模原理決定了所建三維模型的整體性。
傾斜攝影三維模型是由影像解算出點云、迅速構建三角網、之后貼上紋理生成,構建的是一個連續的不規則三角網。因此,整個模型是一個整體,雖然人眼可以迅速通過紋理辨別樓棟、樹木、車輛等物體,但對于計算機來說,把物體分開確是一件很難的事兒。
傳統的人工建模,通過對每個或每類物體進行獨立的建模,之后疊加到一起形成三維場景,從建模開始就是“物體獨立”的,不存在連在一起的現象。而傾斜攝影技術獲取的三維模型數據在初期只能用于簡單的場景漫游,無法分離出物體對象,因此自然也不能記錄每個物體的屬性信息,無法進行單獨管理。
在智慧城市的應用中,大數據、多屬性是一個關鍵技術,三維立體城市不僅是視覺上的立體化,更應該是數據的載體,讓每個物體都可以“活起來”。因此,在對傾斜數據進行應用之前,“單體化”成了必不可少的預處理過程。
“單體化”的目標旨在讓傾斜攝影數據的每個物體分離開來,能夠在整個模型中進行單獨選中、賦予屬性、查詢屬性等基礎GIS操作。“單體化”研究也吸引了很多學者的關注。
從目前來看,單體化主要有三種方法:
第一種是利用三角面片中每個頂點的額外存儲空間,把建筑物(或其他物體)的ID存儲起來,一個建筑物對應的三角形存儲的是共同ID值。
第二種是在三維渲染時,動態地把對應的矢量面疊加到傾斜攝影模型上,達到單體效果。
第三種對三角形進行切割,把連續的三角網從物理上切割開來。
三種單體化中,切割單體化實現了真正意義上的分離,也成為了很多學者的研究重點。目前,基于點集的切割方法運用已比較成熟(圖8),但同時也存在一個很大的問題:切割后的模型具有明顯的“鋸齒”,未達到良好的視覺效果,而基于三角形的切割技術有效的解決了這一問題(圖9)。
不過,這種切割單體化的方法,目前還處在人工切割的階段,也就是說,切割線還僅僅是人工繪制的。可喜的是,隨著圖像識別與機器學習的發展熱潮,基于圖像識別算法對傾斜攝影數據紋理的識別與特征線的識別能夠推動切割單體化的自動實現,從而真正實現傾斜攝影數據的應用普及。
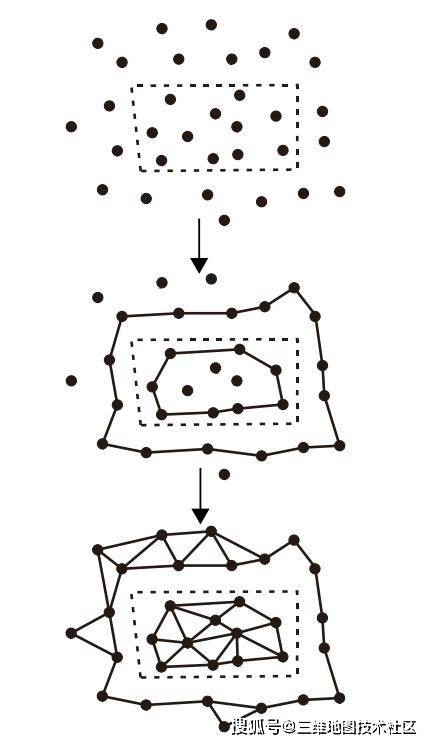
圖8 基于點集的切割單體化
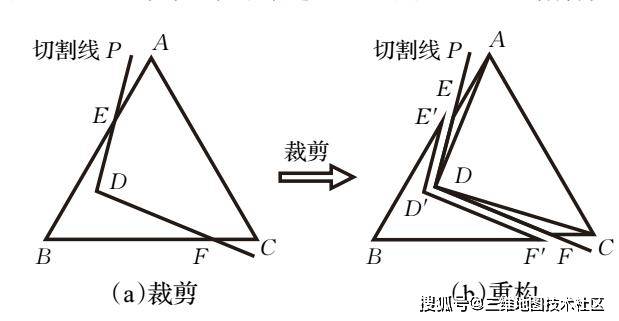
圖9 基于三角形的切割單體化
當我們抬頭看天,無意中看到無人機時,也許它就正在執行著傾斜攝影的任務。當傾斜攝影逐漸普及,有意中我們將發現,智慧城市的發展更加迅速,城市視界變得更加絢麗多彩且炫酷非凡。
本文鏈接:http://www.aiquka.com/industry/639.html
本文標簽:實景三維
上一篇:數字孿生開啟綠色制造新模式
下一篇:貴州測繪地理信息支撐服務鄉村振興











