

是否可以通過將激光雷達與攝影測量技術相結合來提高點云的準確性和密度?激光雷達數據可以穿透樹木并測量陰影區域以生成非常準確的點云。被動成像相機衍生出更詳細的 3D 模型并使用多光譜信息對點云進行編碼,從而產生有用的彩色點云分類。
如果可以合并這些技術會怎樣?中性密度濾鏡對點云顏色有什么影響?本文更詳細地探討了定量和定性點云增強。
無人機(UAV 或“無人機”)在許多環境應用中變得越來越流行,提供點云數字表面模型 (DSM) 和正射影像。無人機飛行生成的數據集的準確性取決于數據捕獲方法,有源激光雷達傳感器或無源遙感傳感器(相機)。點云數據集通常包含大量不良的不規則性,例如局部點密度的強烈可變性、缺失數據、重疊點和噪聲。黎巴嫩大學文學與人文科學學院地理空間實驗室最近的這項研究應用了各種方法來增強點云質量,還進行了現場實驗以減少點云的不規則性。
新的點云質量提升方法
高分辨率和高密度點云在變形監測研究和室內外測繪等許多應用中發揮著重要作用。幾項研究比較了激光雷達和運動 (SfM) 攝影測量技術的結構,發現激光雷達數據集更準確,因為 SfM 派生的結果是可變的。SfM 攝影測量的一個優點是使用多光譜信息對點云進行編碼,這是一種有用的彩色點云分類。但是,激光雷達數據可以穿透樹木并測量陰影區域以生成非常準確的點云。激光雷達掃描儀可提供相對準確的 3D 點云,而被動成像相機則可生成更詳細的真實世界 3D 模型。
地理空間技術用戶經常會問,選擇什么來掃描市區:激光雷達還是攝影測量?但是,當同時使用這兩種技術時會發生什么?風景和街頭攝影師使用中性密度 (ND) 濾鏡來增強他們的圖像,那么為什么不將這種方法應用于攝影測量呢?
黎巴嫩大學文學與人文科學學院的地理空間實驗室開發了一個框架,以引入基于激光雷達和 SfM 融合以及中性密度濾波器在無源傳感器上集成的新型點云質量改進方法。實施了兩項改進:1) 提高激光雷達點云密度和 SfM 點云精度,以及 2) 增強點云顏色。通過測試點云融合和四種中性密度濾鏡(ND-4、ND-8、ND-16 和 ND-32)對點云著色的影響,探索了定量和定性點云增強。
融合
來自許多學科的點云用戶對融合激光雷達和攝影測量數據以定性增強點云表現出興趣。SfM 和激光雷達數據的融合然后增加了數據集的可用性和好處。在這項研究中,研究人員利用激光雷達和 SfM 技術制作了一個點云,并利用迭代最近點 (ICP) 方法將激光雷達和攝影測量點云融合到一個映射框架中。
由于無人機圖像會受到太陽光線的影響,攝影測量師建議在較低的太陽強度下執行任務。為了減少陽光量,專業攝影師使用 ND 濾鏡。由于缺乏在攝影測量中使用 ND 濾鏡的文獻和項目,本研究是最早測試此類濾鏡對無人機數據集增強效果的研究之一。
點云精度和密度增強
激光雷達和攝影測量的航空數據集的地理配準可以通過 GPS-RTK 或 GPS-PPK 在相同的坐標系中完成。迭代最近點 (ICP) 算法有助于減少源激光雷達點云與攝影測量最近點對之間的距離,從而提高精度。
ICP 方法的主要優點是直接使用測量數據,因為不需要插值或其他數據修改。它試圖通過最小化對應點對的平均距離來找到兩個點云之間的最佳變換。
遵循 ICP 算法,基于激光雷達和 SfM 的點云合并為一個融合點云文件(圖 1)。
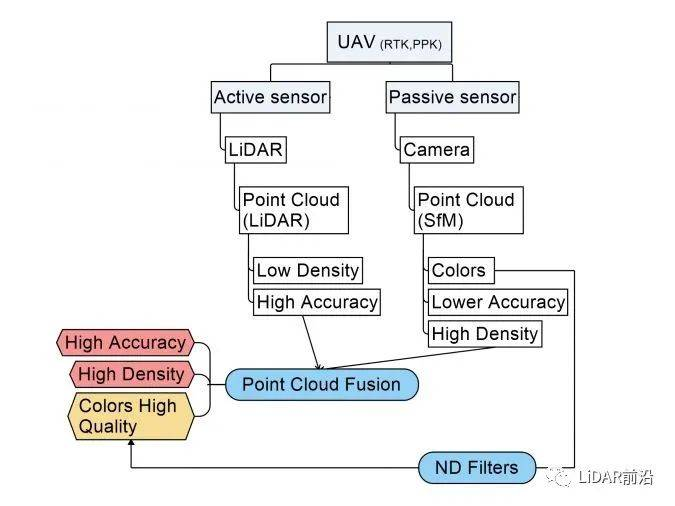
圖 1:點云的定量和定性增強。
新融合點云的特點是激光雷達精度高,SfM點云密度高。在飛行高度為 150m 的市區,研究人員掃描了 845,669 個激光雷達點。在同一個空中平臺上,一臺攝像機拍攝了 343 幀。應用 SfM 技術生成的點云比單獨的激光雷達大七倍,總共有 600 萬個點(圖 2)。
圖 2 的視覺定性分析使用形狀、形式和密度等標準,而定量方法使用點云密度。不同數據集的點云可視化在點密度、細節和噪聲方面顯示出明顯的差異。由于攝影測量點云的噪聲和各種不確定性,使用攝影測量和激光雷達點云檢測建筑物邊界具有局限性。此外,由于激光雷達技術是一種基于激光束的主動遙感技術,它可以檢測電線、圍欄等細長結構。
建筑物邊界的線性結構的視覺分析在激光雷達中具有非常準確的幾何形式。相比之下,在 SfM 中,建筑物和高大的樹木受到陰影的影響并且沒有點云區域。激光雷達和 SfM 之間的差異是由于建筑物和樹木造成的陰影以及樹木在沒有葉子時被忽略(圖 2)。ICP 算法通過填充激光雷達點云中的這些空白區域以在合并的點云中進行插值來解決這一問題。
在 SfM 中,由于地面采樣距離 (GSD) 為 3 厘米,因此檢測到了屋頂上的灌木、小喬木、堤防和太陽能電池板。合并的數據集還可以可視化這些城市結構。SfM 方法不能穿透植被覆蓋。
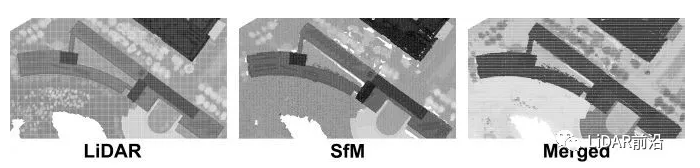
圖 2:城市區域的激光雷達、SfM 和合并點云的示例。
生成的融合點云通過從激光雷達數據集中獲取準確性來提高 SfM 點云的質量,并通過增加 SfM 點云的密度來提高激光雷達點云的質量(Doumit,2020)。
點云顏色增強
中性密度濾光片因其不影響通過它們的光的顏色而得名。使用 ND 濾鏡可以將光線減少一檔、兩檔、三檔或更多檔,從而實現較慢的快門速度(Bryan 2004)。
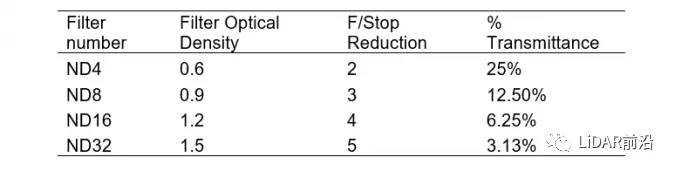
表 1:中性密度濾光片規格(光密度、停止減少和透射率)。
表 1 表明濾光片的光密度和光闌減少隨著濾光片數量的增加而增加,并且對透射率有很大的影響。為了測試 ND 濾光片,在同一區域進行了五次飛行:無濾光片、ND-4、ND-8、ND-16 和 ND-32。處理導致輸出具有相同規格但具有不同顏色、輻射度和紋理的五個點云。無過濾點云作為過濾點云之間比較的基礎。在視覺解釋中(圖 3),在使用 ND-4、ND-8 和 ND-16 生成的點云中檢測到高紋理細節,而在沒有過濾器和使用 ND-32 的點云中,細節不太清晰.
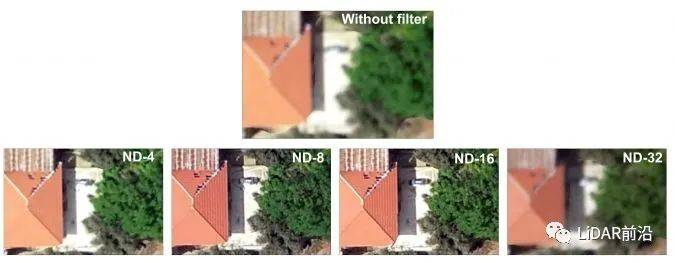
圖 3:不使用和使用中性密度過濾器生成的點云顏色。
在視覺圖像解釋中,ND-8 和 ND-16 被選為顏色較好的點云。如果將圖 3 中顯示的結果從最詳細到最不詳細進行排序,則分類如下:ND-8、ND-16、ND-4 和 ND-32。只有在攝影測量任務期間發生高太陽強度時,才應使用濾光片 ND-32。
結論
研究人員測試了無人機生成的激光雷達和攝影測量點云,以評估點云質量的增強。ICP 用于將兩個點云合并為一個映射框架,以提高攝影測量點云的準確性并為激光雷達點云增加更多的密度。
生產激光雷達、SfM 攝影測量和合并的點云允許在質量方面進行比較。結果表明,經過數據融合處理后,可以增強攝影測量點云的間隙和激光雷達點云的低密度。該研究還考慮了中性密度過濾器對點云顏色增強的影響。
綜上所述,為了更好地繪制大尺度城市區域,最好使用激光雷達和攝影測量點云數據的融合,因為激光雷達可以穿透茂密的植被并準確地產生地面點,而基于圖像的匹配點云可以給出密集的高紋理和高空間分辨率數據集。鑒于此,作者希望新軟件能夠很快用于將攝影測量生成的點云與激光雷達點云合并為一個最終的增強數據集。











