

自然資源部規定于2018年6月底前完成各類國土資源空間數據向2000國家大地坐標系的轉換,并于2018年7月1日后全面使用2000國家大地坐標系;涉及到空間坐標的報部審查和備案項目,全部采用2000國家大地坐標系。高精度GNSS定位技術已經廣泛用于各種測繪工作;其中GPS是主要的定位手段,其定位成果采用WGS84坐標系。經實踐比對,目前WGS84坐標系與CGCS2000坐標系在我國華東地區相差達到0.6m左右,且隨著時間的推移兩者的差異會越來越大;海圖測量一般認為“CGCS2000坐標系可等同于WGS84坐標系”,但海洋工程測量的測圖比例一般都大于1:2000,不能忽略這一差異,因而需要聯測CGCS2000坐標的控制點。
在我國大多數沿海島嶼,聯測已知CGCS2000坐標的控制點相對比較困難,因此研究不需要聯測CGCS2000坐標控制點的WGS84坐標與CGCS2000坐標的轉換方法,實現測量成果轉換有重要實際應用價值。

一、WGS84坐標系和CGCS2000坐標系
WGS84坐標系
WGS84坐標系屬于世界大地坐標系統,由美國國防部制圖局建立。WGS84坐標系采用WGS84橢球,其4個基本橢球參數如下:長半軸a=6378137m,扁率f=1/298.257223563,地心引力常數GM=3.986004418×1014m3/s2,地心自轉角速度w=7.292115×10-5rad/s。不同時期的WGS84坐標系所采用的參考框架及其參考歷元已經歷了4次更新,分別為:
1994年的WGS84(G730)與ITRF1991在1994.0歷元處一致;
1997年的WGS84(G873)與ITRF1994在1997.0歷元處一致;
2002年的WGS84(G1150)與ITRF2000在2001.0歷元處一致;
2012年的WGS84(G1674)與ITRF2008在2005.0歷元處一致。
其中,ITRF1991至ITRF2008是基于GPS、VLBI、SLR、LLR和DORIS等空間技術在不同年份建立起來的全球參考框架,也是IGS站坐標和速度場的具體體現。
CGCS2000坐標系
CGCS2000國家大地坐標系于2008年7月1日啟用,所采用的4個基本參數如下:長半軸a=6378137m,扁率f=1/298.257222101,地心引力常數GM=3.986004418×1014m3/s2,地心自轉角速度w=7.292115×10-5rad/s。CGCS2000坐標框架是利用全球47個IGS核心站的ITRF97框架的坐標和速度矢量,以2000.0歷元為參考歷元,結合我國GNSS觀測數據所建立的參考框架。
兩種坐標系的差異
WGS84坐標系與CGCS2000坐標系的4個橢球基本參數中只有扁率有微小差異,由此引起的坐標差異約為0.1mm,在當前測量精度下可忽略。由于WGS84坐標框架經過了4次更新,不同時期WGS84坐標框架與CGCS2000坐標框架之間的差異不能忽略,如2012年后的WGS84(G1674)坐標是ITRF2008框架在2005.0參考歷元的坐標,與CGCS2000的差別達到半米以上,必須要進行轉換。
二、WGS84坐標與CGCS2000坐標的轉換方法
采用各地區建成的CORS系統或千尋位置服務的“千尋知寸—FindCM”高級定位服務,或聯測已有CGCS2000控制點進行聯合平差,可直接求得CGCS2000坐標;但受到CORS或千尋的服務區域,或者CGCS2000控制點的限制。由于GNSS精密點定位不需要聯測任何控制點就能獲取精確的WGS84坐標,本文研究如何將觀測的WGS84坐標直接轉換為CGCS2000坐標的轉換方法。
由于觀測手段的改進和觀測精度的提高,ITRF參考框架也在不斷精化,不同時期的ITRF框架之間存在系統性差異。且因地球板塊運動,各板塊之間和板塊內部都存在長期漫長的相對運動,引起同一框架不同歷元的坐標也有差異。因此,將WGS84坐標轉換至CGCS2000坐標,需要進行參考框架轉換和歷元改正,即利用不同參考框架之間的轉換參數進行參考框架轉換,利用板塊運動速度場模型進行歷元改正。理論上,先轉換參考框架再進行歷元改正與先改正歷元再進行參考框架轉換是等價的,實際的數據處理結果也驗證了這一觀點。不同參考框架之間的轉換參數由國際地球自轉與參考系統服務(IERS)提供,板塊運動速度場模型國內、外學者進行了大量研究,可經過比較測試后采用合適的速度場模型。由于板塊運動不僅包含線性運動,也包含非線性運動,隨著時間的推移非線性運動的累積誤差可能逐漸增大。經算例分析統計,從2000年至今近20年時間,累計誤差在華東區域約為1~3cm,在可接受范圍內。
三、WGS84與CGCS2000坐標的轉換步驟
參考框架轉換
IERS已發布了ITRF88-94、ITRF96-97、ITRF2000、ITRF2005和ITRF2008、ITRF2014、ITRF2020等全球參考框架。不同參考框架下的三維空間坐標可采用布爾沙模型進行相互轉換,其轉換公式如下:
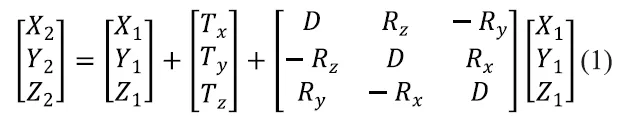
式中:Tx,Ty,Tz和Rx,Ry,Rz分別為x,y,z三個坐標軸的平移參數和旋轉參數,D為尺度參數。這些轉換參數等于基準歷元的參數P(t)加上歷元t到轉換歷元的變換量:

由于當前的WGS84坐標是ITRF2008框架在2005.0歷元的坐標,CGCS2000坐標是ITRF97框架在2000.0歷元是坐標,因此WGS84坐標與CGCS2000坐標的框架轉換是ITRF2008與ITRF97框架的轉換,其歷元差為t-t=5a。兩個框架間的轉換參數及其變化速率見表1。
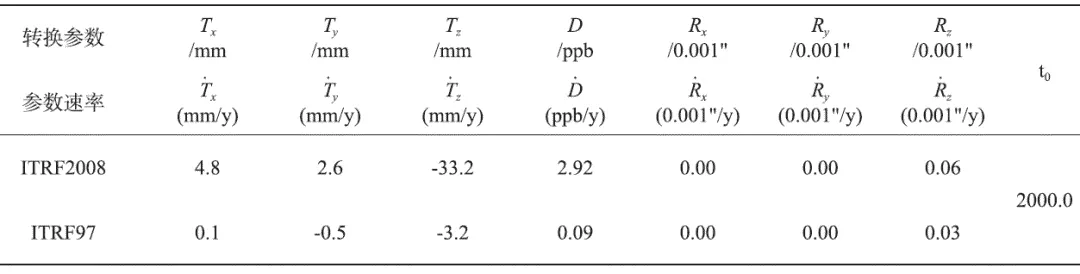
表1 ITRF2008轉換到ITRF97框架的轉換參數及其速率
板塊運動改正
地球不是一個剛體,地球板塊會有漂移和形變,板塊之間還有擠壓、抬升、下降等運動,他們的運動趨勢從長期分析是一個非線性非勻速運動,但是從局部和短期內可以把它認為是一種線性勻速運動。板塊運動改正即根據板塊運動速度計算測站的速度,并依據計算速度將站點坐標從某一歷元歸算到另一歷元。
ITRF框架之間轉換,歷元不同對轉換坐標的影響遠遠大于框架轉換系數的影響,這是因為板塊運動導致測站的位置變化,累計到當前已達到分米級。板塊運動改正的關鍵是利用合適的板塊運動模型計算出測站所在位置的板塊運動速度,若基于歐拉矢量方式(有些學者經平差計算后給出的板塊速度是空間直角三維坐標的變化速度)表示板塊運動模型,則測站速度計算公式為:
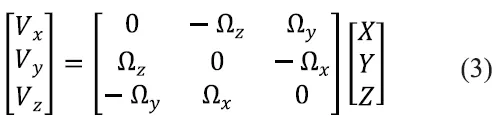
計算得到Vx,Vy,Vz后,就可以進行坐標的歷元歸算,公式如下:
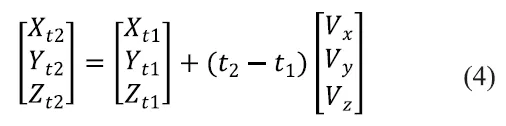
基于當前歷元的觀測求解得到的WGS84坐標和CGCS2000的框架歷元跨度接近20年,如果沒有準確的點位速度場,經上面公式改正的點位誤差依然可能達到分米級。常用的速度場模型如下:
NNR-NUVEL1A模型
地質學家根據最近百萬年的地質學和地球物理資料,推導出板塊運動的平均速度模型,目前國際上推薦使用的是NNR-NUVEL1A板塊運動模型,該模型將全球劃分為14個板塊,我國處于歐亞板塊的東部。
NNR-NUVEL1A反應的是大時間尺度上板塊的穩定性、剛性運動,其采用的數據在中國也比較少,通過NNR-NUVEL1A模型計算得到的中國大陸速度場殘差在E方向和N方向最大值都超過30mm/a,整體RMS也接近10mm/a,說明NNR-NUVEL1A模型只扣除了中國大陸速度場的部分運動趨勢,因此不能完全反映中國大陸的整體運動。目前國外通用軟件在大多采用該模型,這也是通用軟件提供的CGCS2000坐標的最大缺陷。
CPM-CGCS2000模型
CPM-CGCS2000模型是基于中國地殼運動觀測網絡2001—2010年跨度長達10年的觀測數據,采用基準優選和變異點數據分段處理等策略,計算獲得ITRF2005框架下高精度速度場,同時針對國際上現有的NNR-NUVEL1A、APKIM2005、PB2002等板塊模型在中國區域適應性差,基于中國地質構造特性及實際速度場解算結果,構建了中國20個二級板塊運動模型,CPM-CGCS2000板塊歐拉矢量及板塊擬合誤差見表2,與國際上現有的幾個成熟的模型相比,在整個中國地區,CPM-CGCS2000相較于現有模型更能精確反映站點的水平運動,并且精度提高了2至5倍。其轉化精度優于國際上現有比較成熟的速度場模型,同時該模型也是《大地測量控制點坐標轉換技術規范》(CH/T2014-2016)規范規定采用的模型。
板塊 | 歐拉矢量/rad·Ma | 擬合誤差/mm·a-1 | ||
| Ωx | Ωy | Ωz | σ |
阿爾泰 | 0.000628 | -0.001876 | 0.004746 | 0.74 |
阿拉善 | 0.000410 | -0.005542 | 0.001580 | 0.82 |
巴顏喀拉 | 0.000242 | -0.006253 | 0.002678 | 2.02 |
柴達木 | 0.001663 | -0.010674 | 0.000900 | 2.86 |
華南 | -0.000936 | -0.002695 | 0.004548 | 1.67 |
川滇 | 0.000616 | -0.016341 | -0.002104 | 3.39 |
滇西南 | -0.001726 | -0.002290 | 0.003626 | 2.38 |
拉薩 | 0.002986 | -0.006392 | 0.003822 | 5.02 |
魯東海 | -0.001957 | -0.000385 | 0.006133 | 0.69 |
羌塘 | 0.002197 | -0.027764 | -0.008042 | 2.48 |
祁連 | 0.000247 | -0.004865 | 0.002917 | 1.94 |
南海 | 0.000102 | -0.004319 | 0.003061 | 1.50 |
天山 | 0.000856 | -0.002689 | 0.004057 | 1.29 |
中蒙 | -0.000743 | -0.001777 | 0.004637 | 0.88 |
塔里木 | 0.000904 | -0.009939 | -0.002243 | 1.76 |
準噶爾 | 0.000748 | -0.000028 | 0.006592 | 1.31 |
中韓 | -0.001021 | -0.001582 | 0.004737 | 0.98 |
華北 | -0.001083 | -0.001761 | 0.005133 | 0.88 |
鄂爾多斯 | -0.001116 | -0.001303 | 0.005514 | 0.98 |
燕山 | -0.000773 | -0.002084 | 0.004447 | 0.81 |
表2 CPM-CGCS2000板塊歐拉矢量及板塊擬合誤差
其它模型
NNR-NUVEL1A模型存在殘差過大的缺點,CPM-CGCS2000模型的板塊劃分,一般用戶無法獲得點位所在的板塊,局部小塊體處于同一塊體的可能性比較大,只能大致認定所在板塊。關于速度場模型的研究,魏子卿等構建了中國大陸地區3°×3°和2°×2°速度場模型,以空間直角坐標變化速度方式給出了格網平均速度,方便設計程序自動判斷模型參數。苗岳旺等將中國大陸按照省級行政單位劃分塊體,求解了31組歐拉矢量,一般用戶都能方便的判斷測區所在省級行政單位。國外其它模型還有APKIM2005、PB2002等。

圖1CPM-CGCS2000板塊劃分
四、算例
按照上述的參考框架轉換方法和轉換步驟,本文編制了WGS84和CGCS2000坐標批量相互轉換的計算程序,提供了觀測文件(*.RAW)或成果文件(*.XYZ)的批量轉換。程序內置了本文介紹的幾種速度場模型,方便用戶根據具體情況進行選擇。經比較,相同控制點利用不同速度場模型進行歷元歸算,CPM-CGCS2000精度最高,NNR-NUVEL1A最差。
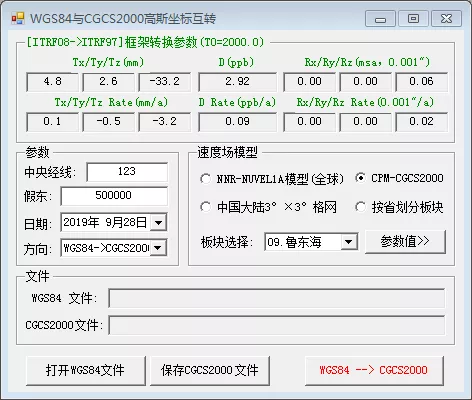
圖2 WGS84和CGCS2000坐標批量轉換程序
2018年8月在浙江某工程中,采用星站差分SeaStar在已知控制點上進行固定點比對(采集時間1h以上,共4232點),測得的坐標(WGS84坐標)與控制點已知的CGCS2000坐標存在偏差(平均差值東向約0.59m,北向-0.25m),將測量成果經程序轉換后再與已知CGCS2000的坐標比較,剩余平均偏差約3.5cm,即轉換殘差為3.5cm,考慮到板塊非線性運動和觀測誤差的綜合影響,該誤差完全滿足工程的要求。觀測點相對于已知點CGCS2000坐標的分布如圖3所示。
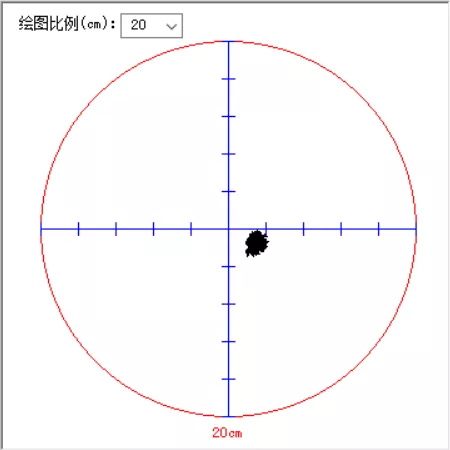
圖3 浙江某工程固定點比對觀測點分布圖
同時本文下載了IGS站SHAO在ITRF2008框架下2000.0-2019.0每年1月1日的坐標,利用程序經框架轉換和歷元歸算轉為CGCS2000坐標,并與該點的CGCS2000已知坐標進行比較,從圖4(圖中X,Y,Z分別代表三個維度的差異,T為總的位置差)可以看出,殘差最大不超過3cm。
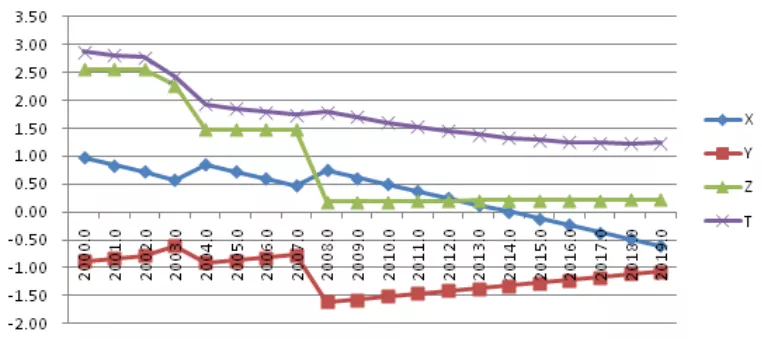
圖4 WGS84坐標轉至CGCS2000坐標成果的殘差分布
五、結論
通過參考框架轉換與歷元歸算,實現WGS84坐標與CGCS2000坐標的轉換,通過前文分析可得出如下幾點結論:轉換精度約在幾個厘米,能滿足生產要求;且框架的影響遠小于歷元的影響,若精度要求為10厘米級時,不進行框架轉換也能滿足要求;歷元的歸算受速度場模型的影響較大,經測試CPM-CGCS2000模型精度最高;國際通用軟件一般采用NNR-NUVEL1A模型,在中國大陸地區誤差較大,需謹慎使用;本文是基于WGS84坐標當前的框架ITRF2008進行的分析,如WGS84再次進行精化改變了GPS衛星星歷的框架,需根據具體情況進行相應的轉換。
【作者簡介】文/張祥文 陳正偉,均來自上海海事測繪中心。第一作者張祥文,男,1967年出生,本科,高級工程師,主要從事海洋測繪研究;通訊作者陳正偉,男,1981年出生,本科,高級工程師,主要從事海洋測繪研究。文章來自《海洋技術學報》(2020年第6期),參考文獻略,用于學習與交流,版權歸作者及出版社共同擁有。
本文鏈接:http://www.aiquka.com/blog/127.html
本文標簽:坐標系











